
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1

冲压机器人主要由执行机构、驱动机构和控制系统三大部分组成。优质焊接机器人手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机器人设计的关键参数,焊接机器人生产厂家自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂,一般专用机械手有2~3个自由度。控制系统是通过对冲压机器人每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制,控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。

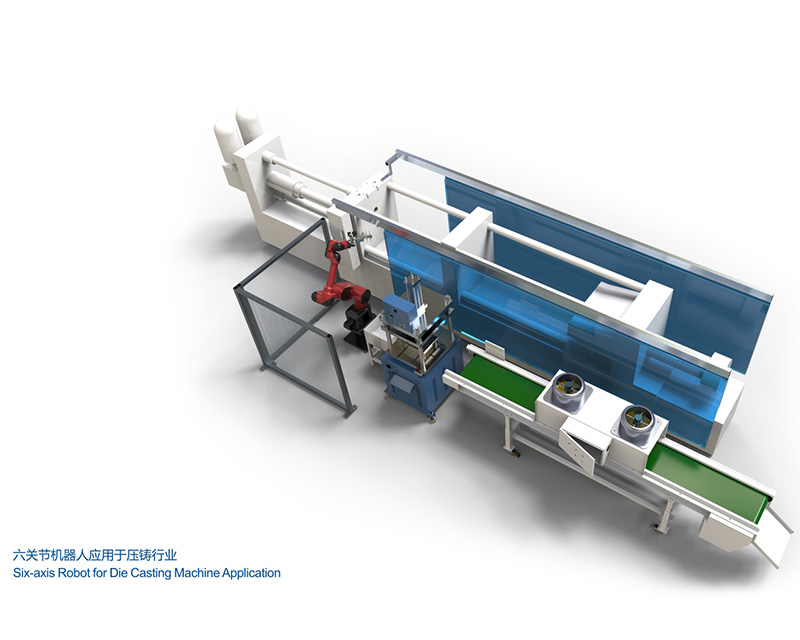
在现代化制造加工业中,要求精度高、品质稳定、批量加工速度快,采用人工方式进行作业导致制造加工水平很难得到提升,采用机器人进行自动化上下料,是机器人在制造业中应用最广泛最成熟的领域之一。工业机器人,配备液压和气动传送料装置、非标抓具、吹屑装置、安全防护装置等,实现高质、高效、安全、有序的工件加工全过程。可适用于机床、注塑机、压铸机等周边自动化上下料行业,为提高生产效率,降低制造成本。优质焊接机器人1.可以实现多台数控机床的灵活组合,多自由度的自动上下料与工件装夹,满足高难度的生产工艺要求;2.可配置工业CCD视觉检测,实现复杂工件的自由抓取;3.可实现单工件大批量持续生产,可实现多品种小批量的程序自动转换生产4.可调性高,焊接机器人生产厂家实现与数控机床、PLC、外部感应器等其他设备的通讯,通过编程实现安全可靠的顺序控制。5.多功能性:高性能防碰撞、产品检测、外部轴、码垛等可选配功能。6.可轻易实现多联机自动化生产流水线及“数字化”工厂布局,最大程度节省人力,提升工厂生产的技术形象。

在国外很多的国家工业机器人的使用比国内要普及的多,最早的机器人取代了不受人们欢迎的工作。机器人接管了危险的手动工作和繁琐的工作,如在制造和施工中操作重型机械或在实验室中处理危险化学品。很多的机器人在很大程度上可以做到独立运作,在未来机器人将会与人类合作。优质焊接机器人工业机器人的保障措施是确保机器人和工作人员的安全,如何确保快速移动的机器人不会因为过多的力量撞击或是伤害到人,这是至关重要的。当人类远程控制机器人是,他们的机械手可以轻松地完成任务。焊接机器人生产厂家现在我们可以通过人工手来跟踪和复制人的手指运动。一家国外工厂的工会代表说,由于工业机器人接管了生产线上的一些体力工作,工人们的健康问题已经得到了缓解。在以前,从事这项工作的工人经常患肩颈部问题和腕管综合征。

工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的工业机器人还有行走机构。优质焊接机器人大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,焊接机器人生产厂家通过RS232串口或者以太网等通信方式传送到工业机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。
对于自动化行业的资深的机、电工程师来说,选择合适的“机器人”也许是一个简单的工作。但是对于那些第—次准备购买、导入机器人的设计人员或工厂来说,也许会有些迷茫。今天领拓就带您了解一下如何选择一个合适的工业机器人。优质焊接机器人首先需要评估导入的机器人是用于怎样的应用场合以及什么样的制程。若是应用制程需要在人工旁边由机器协同完成,对于通常的人机混合的半自动线,特别是需要经常变换工位或移位移线的情况,以及配合新型力矩感应器的场合,协作型机器人(Cobots)应该是一个很好的选项。如果是寻找一个紧凑型的取放(Pick& Place)料机器人,你可能想选择一个水平关节型机器人(Scara)。如果是寻找针对小型物件,快速取放的场合,并联机器人(Delta)就适合这样的需求。焊接机器人生产厂家接下来的讨论,我们将针对垂直关节多轴机器人(Multi-axis)。这种机器人可以适应一个非常大范围的应用。从取、放料到码垛,以及喷涂,去毛刺,焊接等专用制程。现在,工业机器人制造商基本上针对每一种应用制程都有相应的机器人方案。你所做的只需要明确你希望机器人为你做哪个工作,以及从不同的种类当中,选择适合的型号。如果你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷。


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
