
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1

在诸多焊接方式中,由于点焊只需点位控制,至于焊钳在点与点之间的移动轨迹没有严格要求,因此点焊对所用的机器人的要求是不很高的,这也点焊机器人较早被应用的原因之一。定制工业机器手但为了确保焊接质量,基本的要求还是要满足的,比如说点焊机器人不仅要有足够的负载能力,而且在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间,提高工作效率。在实际焊接过程中点焊机器人需要有多大的负载能力,主要取决于所用的焊钳形式,对于用与变压器分离的焊钳,30~45kg负载的机器人就足够了。但是这种焊钳一方面由于二次电缆线长,电能损耗大,也不利于机器人将焊钳伸入工件内部焊接;另一方面电缆线随机器人运动而不停摆动,电缆的损坏较快。工业机器手厂因此一体式焊钳逐渐将其代替。考虑到点焊机器人要有足够的负载能力,才能以较大的加速度将焊钳送到空间位置进行焊接,一般都选用100~150kg负载的重型机器人。为了适应连续点焊时焊钳短距离快速移位的要求,有些重型机器人增加了可在0.3s内完成50mm位移的功能,而这也对电机的性能,微机的运算速度和算法都提出更高的要求。
码垛机器人的技术保养是指:为了使机械经常处于良好的技术状态,保证其可靠性,提高工作效率,延长使用寿命而对机械所采取的一系列技术措施。其主要内容是以清洁、紧固、润滑和调整为主,并结合相关的检查和检测工作。各类型的机械设备在“使用和保养手册”中都有明确的保养规定。定制工业机器手1、码垛机的润滑零部件特别多,同时不同的部件所添加的油品也不同,要根据使用说明书,进行添加润滑油。如:齿轮齿条,导轨滑块,大小齿轮,气缸,升降系统,等等,都是需要进行加润滑油的部件。2、检查升降机,检查油质和油位。因为升降机主要就是依靠液压油来进行升降,所以要密切检查,同时在检查时禁止交叉作业,防止意外的发生。3、检查主轴系统,对齿轮齿条,导轨滑块,气缸等部位进行检查,是不是有异响,是不是该润滑。如果有松动的地方,要进行紧固。工业机器手厂4、检查输送机。输送机传送动力不足时要进行维修,发现链接部位有松动,也要进行紧固。5、检查旋转平台系统。看一下减速机是否有异常,齿轮是否有磨损,发现有磨损的地方,要及时更换。

工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的工业机器人还有行走机构。定制工业机器手大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,工业机器手厂通过RS232串口或者以太网等通信方式传送到工业机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。

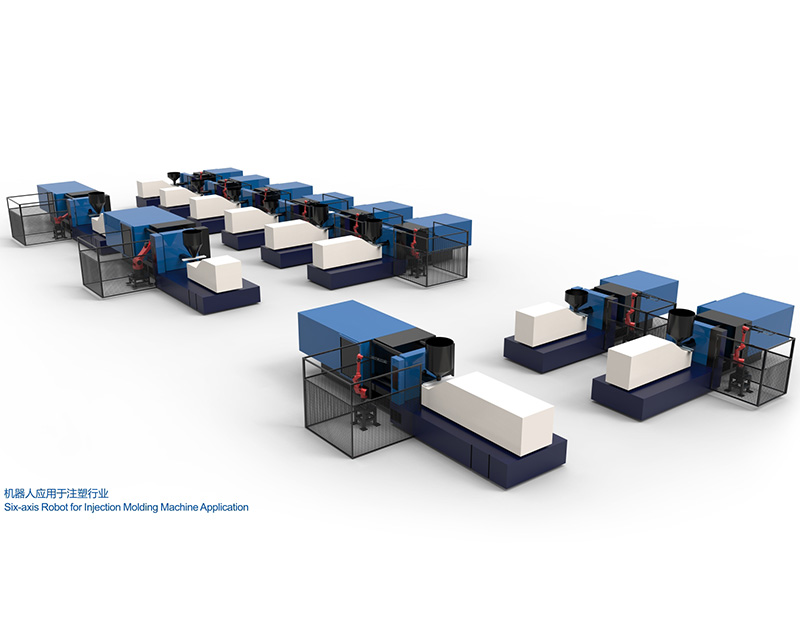
在现代化制造加工业中,要求精度高、品质稳定、批量加工速度快,采用人工方式进行作业导致制造加工水平很难得到提升,采用机器人进行自动化上下料,是机器人在制造业中应用最广泛最成熟的领域之一。工业机器人,配备液压和气动传送料装置、非标抓具、吹屑装置、安全防护装置等,实现高质、高效、安全、有序的工件加工全过程。可适用于机床、注塑机、压铸机等周边自动化上下料行业,为提高生产效率,降低制造成本。定制工业机器手1.可以实现多台数控机床的灵活组合,多自由度的自动上下料与工件装夹,满足高难度的生产工艺要求;2.可配置工业CCD视觉检测,实现复杂工件的自由抓取;3.可实现单工件大批量持续生产,可实现多品种小批量的程序自动转换生产4.可调性高,工业机器手厂实现与数控机床、PLC、外部感应器等其他设备的通讯,通过编程实现安全可靠的顺序控制。5.多功能性:高性能防碰撞、产品检测、外部轴、码垛等可选配功能。6.可轻易实现多联机自动化生产流水线及“数字化”工厂布局,最大程度节省人力,提升工厂生产的技术形象。

如何选购合适的焊接机器人呢?首先要了解焊接机器人有哪些技术指标及特殊的技术指标,这是正确使用机器人的前提。产品手册也有列技术指标,但是单从手册上了解会比较表面,最好是根据实际需要理解某些特定的性能指标,才能更加深入这个行业。定制工业机器手焊接机器人的主要技术指标可分为两部分,机器人的一般指标和焊接机器人的特殊指标。机器人通用技术指标自由度数这是反映机器人灵活性的重要指标。工业机器手厂一般而言,在机器人工作空间中可以到达3个自由度,但是焊接不仅必须到达空间中的某个位置,而且还必须确保焊枪(切削工具或焊钳)的空间姿势。因此,电弧焊和切割机器人至少需要5个自由度,点焊机器人至少需要6个自由度。


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
