
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
电弧传感器有其独特的优势:①检测点就是焊接点,不存在传感器先行的问题,是完全实时的传感器。②由于电弧本身作为传感器,所以不受焊丝弯曲引起电弧偏移的影响。③不仅可以跟踪传感,保证焊接参数的稳定,而且还可以改善焊缝的成形效果。④抗光、电磁、热的干扰,使用寿命长。 2--电弧传感的工作原理,优质注塑输送带流水线电弧传感器利用焊接过程中的焊接电流或电弧电压的变化来获得电弧中心是否偏离焊缝,并以此作为传感信息,实时性强,跟踪效果好。在图1所示V形焊缝中,传感器通过摆动的电弧测量焊枪在焊缝的位置,其原则是焊枪必须运行在焊缝的中心,并且对于焊缝的根部保持确定的高度。如果由于工件的制造误差,在焊接过程中路线发生偏离,使焊丝在焊缝两边的干伸长不一样,导致实际的焊接电流与设定的电流不同。干伸长越短,实际电流越大;干伸长越长,实际电流越小。注塑输送带流水线价格利用这个原理,传感器的信号将实时地反馈到机器人控制系统,使机器人做出迅速精确的反应。对机器人在焊接过程中的运动轨迹进行实时修正,即能实现焊缝的精确再定位,也就是说最初编程的轨迹会按着实际焊缝轨迹自动修正,保证轨迹中心线始终在坡口中心。从而保证良好的焊缝成型。

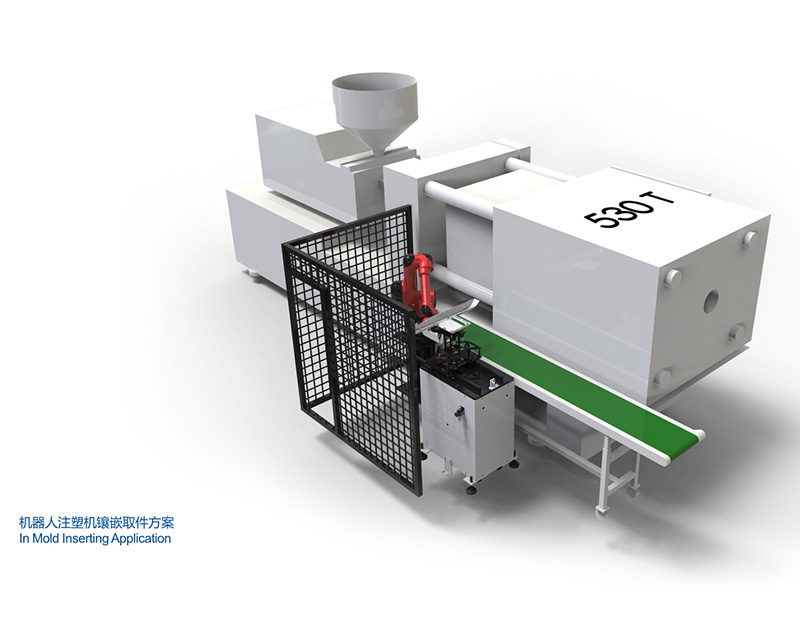
常见冲床机械手是工业生产中常用的进行水平/ 垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的四轴机器人电磁阀控制。下面介绍下冲床机械手的组成部分和运动情况。冲床机械手主要由起固定支撑作用的机架、优质注塑输送带流水线机械臂和气爪三部分组成。驱动第一肩关节的运动有2根气动肌肉组成,机架臂有4根气动肌肉组成,大臂上安装有4根气动肌肉,小臂上安装有4根气动肌肉。v的分类;1.按驱动方式可分为液压式、气动式、电动式、机械式机械手;2.按适用范围可分为专用机械手和通用机械手两种;注塑输送带流水线价格3.按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。冲床机械手能够实现4个自由度的运动,其各自的自由度的驱动全部由气动肌肉来实现。最前端的气爪抓取物品,通过气动肌肉的驱动六轴机器人实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机械手的动作要求。 而冲压机械手的动作过程如下:从原点开始按下启动按钮时,下降电磁阀通电,机械手开始下降。
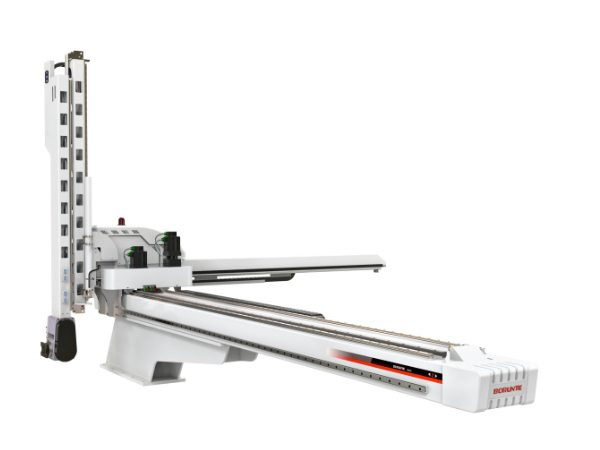
六轴机器人工具快换装置的优点,领航机器人推荐在六轴机器人末端上使用,进行规则的圆盘类或棒料类的小型零件的自动化加工,特别适合于加工节拍短,生产批量大的场合。优质注塑输送带流水线一、六轴机器人工具快换装置的优点1.生产线更换可以在数秒内完成;2.维护和修理工具可以快速更换,大大降低停工时间;3.通过在应用中使用1个以上的末端执行器,从而使柔性增加;4.使用自动交换单一功能的末端执行器,代替原有笨重复杂的多功能工装执行器。六轴机器人工具快换装置的优点,数控机床机器人工具快换装置,使单个机器人能够在制造和装备过程中交换使用不同的末端执行器增加柔性,被广泛应用于自动点焊、弧焊、材料抓举、冲压、检测、卷边、装配、材料去除、毛刺清理、包装等操作。注塑输送带流水线价格另外,工具快换装置在一些重要的应用中能够为工具提供备份工具,有效避免意外事件。相对人工需数小时更换工具,工具快换装置自动更换备用工具能够在数秒钟内就完成。同时,该装置还被广泛应用在一些非机器人领域,包括托台系统、柔性夹具、人工点焊和人工材料抓举。

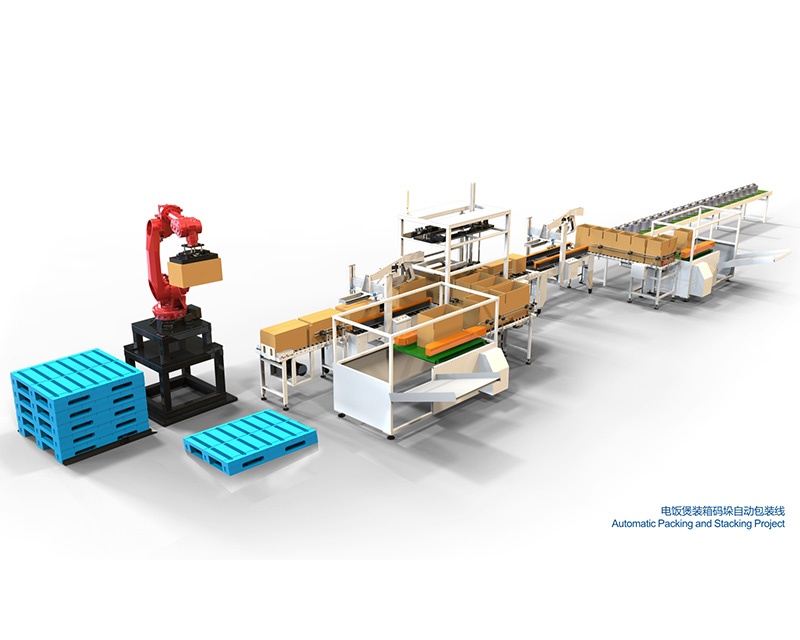
随着现在工业化设备的不断发展与进步,许多工厂、企业都会去选择一些自动化机器来代替人工,尤其在快递物流、运输等行业,一些设备更是早早就被用上,像自动化分拣机器,分拣机械手,自动化传送机等,今天我们要了解是就是码垛机器人,你知道码垛机器人有哪些特性吗?码垛机器人,是机械与计算机程序有机结合的产物。优质注塑输送带流水线为现代生产提供了更高的生产效率。码垛机器在码垛行业有着相当广泛的应用。码垛机器人大大节省了劳动力,节省空间。码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高。码垛机器人系统采用zhuanli技术的坐标式机器人的安装占用空间灵活紧凑。能够在较小的占地面积范围内建造高效节能的全自动砌块成型机生产线的构想变成现实。码垛机器人的优点:1、结构简单、零部件少。因此零部件的故障率低、性能可靠、保养维修简单、所需库存零部件少。2、占地面积少。有利于客户厂房中生产线的布置,并可留出较大的库房面积。码垛机器人可以设置在狭窄的空间,即可有效地使用。3、适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变化时只需在触摸屏上稍做修改即可,不会影响客户的正常的生产。注塑输送带流水线价格而机械式的码垛机更改相当的麻烦甚至上是无法实现的。4、能耗低。通常机械式的码垛机的功率在26KW左右,而码垛机器人的功率为5KW左右。大大降低了客户的运行成本。5、全部控制可在控制柜屏幕上操作即可,操作非常简单。6、只需定位抓起点和摆放点,教示方法简单易懂。

在许多的生产线,常有码垛机器人来进行货品的运送和堆垛,应用码垛机器人要比传统式的人工效率提升数倍,另外也可以减少公司的劳动力成本费。那什么叫自动式码垛机械手呢?优质注塑输送带流水线自动式码垛机械手能效仿人手、臂的一些姿式功能,用于按固定程序流程抓取、运送物品或实际操作工具的全自动操作设备。自动式码垛机械手是较早出現的工业机器人,它可替代人的繁杂工作以进行生产制造的专业化和自动化,广泛运用于轿车、装饰建材、食品类、包裝、化工厂、粮油食品、五金配件、机械设备、等行业的运送、堆垛等工作。注塑输送带流水线价格自动式码垛机械手主要由执行器、驱动器组织和自动控制系统三大部分构成。手臂是用于抓持产品工件(或工具)的构件,依据被抓持物品的样式、规格、净重、材质和作业规定而有各类结构形式,如夹紧型、托持型和吸咐型等。运动组织,使手臂进行各类转动(晃动)、挪动或复合型运动来进行规定的姿式,改变被抓持物品的具体位置和姿式。上述便是码垛机械手的大概介紹了,码垛机械手为生产制造的发展带来了许多益处,不但堆垛齐整美观,使生产率获得了大幅的提升,还为公司节约了许多的劳动力成本费。
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理四轴机器人的基本工作原理是示教再现;优质注塑输送带流水线示教也称导引,即由用户导引六轴机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。注塑输送带流水线价格3、机器人控制的分类1)按照有无反馈分为:开环控制、闭环控制;开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。2)按照期望控制量分为:位置控制,力控制,混合控制 ;位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制;3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
