
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
现在用的最多的工业机器人,一般都是六轴的,但是推出的人机协作机械臂,却有7个自由度,一直想不明白为什么。优质伯朗特直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个自由度是对人手臂的真实还原。人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。伯朗特厂回答这个问题的是知乎网友杨硕,答案如下:实话说,我对robot manipulation还是挺熟的,但是楼上几个答案一眼看去都看不懂。不是黑,而是觉得对非专业人士来说不好理解。我来尽量用通俗的语言解释一下。首先,问题的答案是:数一下就行了啊!

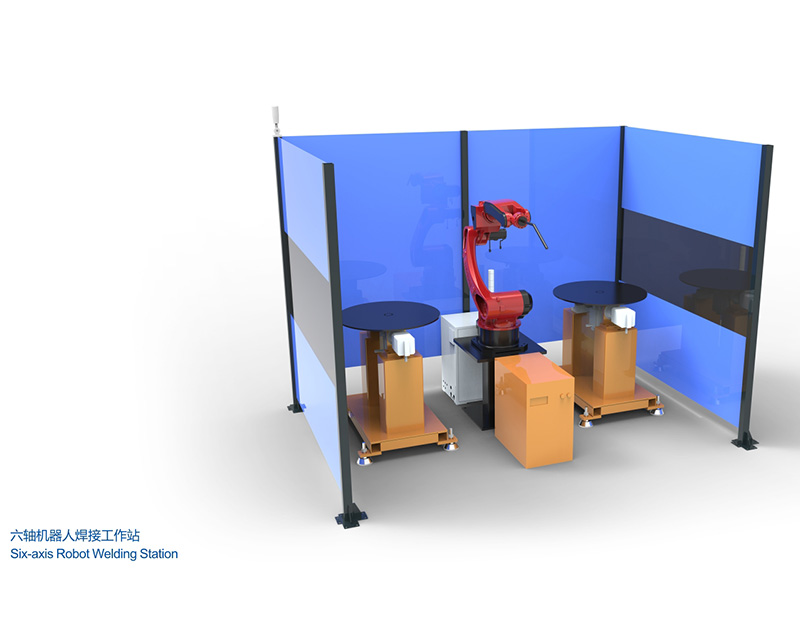
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理四轴机器人的基本工作原理是示教再现;优质伯朗特示教也称导引,即由用户导引六轴机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。伯朗特厂3、机器人控制的分类1)按照有无反馈分为:开环控制、闭环控制;开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。2)按照期望控制量分为:位置控制,力控制,混合控制 ;位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制;3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;
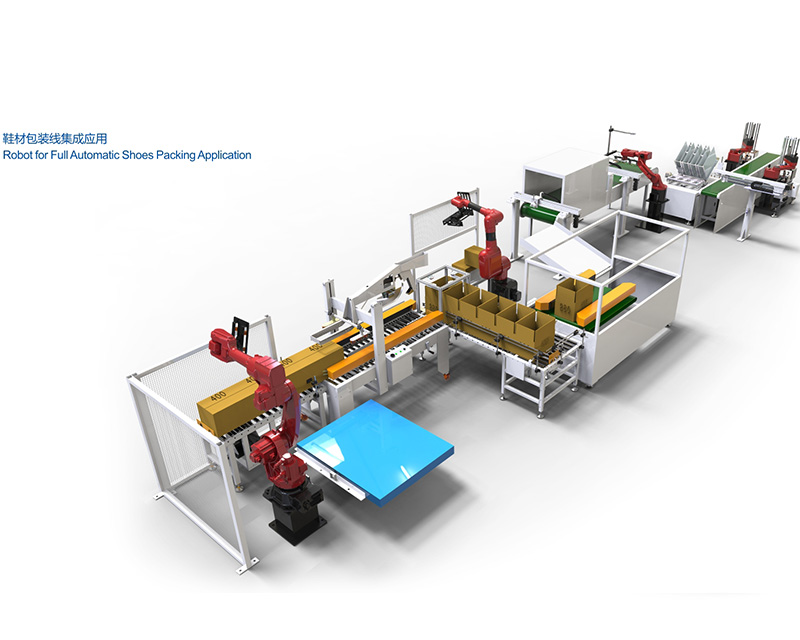
搬运机械手在工业生产中到底有什么样的作用呢?在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,优质伯朗特都要用到机械手来完成工件的取放。对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带A上的工件或物品搬运到传送带B上。机械手的上升、下移、左移、右移抓紧和放松都是用双线圈三位电磁阀气动缸完成。当某个电磁阀通电时,就保持相对应的动作,即使线圈再断电仍然保持,直到相反方向的线圈通电,相对应的动作才结束。伯朗特厂设备上装有上、下、左、右、抓紧、放松六个限位开关,控制对应工步的结束。传送带上设有一个光点开关,监视工件到位与否。机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。

四六轴冲压机器人安全,高效且节约成本,提升产品质量;一两年内可回收资本,为企业能节约6-8年的生产时间。优质伯朗特安全性:人工在操作冲压设备时,很容易发生安全问题,机器人不存在这样的安全隐患。节省人力:众所周知,国内外劳动力成本越来越高,招工越来越难,国内现在的劳动力成本已经比以前涨了很多倍,六轴冲压机器人四轴冲压机器人可以完成代替劳动力的作用,大大减少劳动力成本。提高产品合格率:人工工作过程中,保修本钱高,零件返工频频,出产推迟,许多零件兼容性等疑问。关键的还是材料的浪费,伯朗特厂现在的六轴机器人经过精细化设置,可以让每个材料用到低的浪费提升商品质量:六轴冲压机器人四轴冲压机器人经过程序设置了之后,可以做到零失误,产品质量提升,为企业带来更好的收益。


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
