
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号

购买焊接机器人需要替代人工,增加效率,降低管理成本。焊接机器人拥有稳定和提高焊接质量,保证其均一性。焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定作用。采用机器人焊接时对于每条焊缝的焊接参数都是恒定的,质量受人的因素影响较小,降低了对工人操作技术的要求,供应工业机器人因此焊接质量是稳定的。而人工焊接时,焊接速度、干伸长等都是变化的,因此很难做到质量的均一性。采用机器人焊接工人只是用来装卸工件,远离了焊接弧光、烟雾和飞溅等,使工人从大强度的体力劳动中解脱出来。焊接机器人没有疲劳,可24小时连续生产,使用机器人焊接,效率明显提高。工业机器人价格焊接机器人的生产节拍是固定的,因此安排生产计划非常明确,可实现小批量产品的焊接自动化。机器人与专机的区别是他可以通过修改程序以适应不同工件的生产。另外还能提高工厂的自动化程度,可以申请政府给企业的自动化改造费用

1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理四轴机器人的基本工作原理是示教再现;供应工业机器人示教也称导引,即由用户导引六轴机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。工业机器人价格3、机器人控制的分类1)按照有无反馈分为:开环控制、闭环控制;开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。2)按照期望控制量分为:位置控制,力控制,混合控制 ;位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制;3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;
现如今材料喷漆工作所花费的费用很高,而且此类工作对人体潜在危害很大。与之相比,喷涂机器人的出现让此项工作更安全快速节约材料,蕴藏的益处颇多,大受行业同仁的关注和赞赏。喷涂机器人这项科技在未来几年必定会得到迅速普及。那么品牌好的喷涂机器人具有哪些特点呢; 一、喷涂效率高更省料许多人都对喷涂机器人哪种好用又实惠感到好奇,其实喷涂效率很考验真功夫,优质的喷涂机器人手臂伸缩自如,能弯曲和旋转深入到微小缝隙中认真作业,角角落落都能喷涂到位不留空白。喷涂完毕后会发现喷漆量较人工操作利用率高出很多,节约原料更省钱。供应工业机器人二、节约大量人工费售后服务好的喷涂机器人媲美人手操作,其喷涂轨迹可以现场模拟而不必进行繁琐的编程,操作简单易行普通人都能迅速上手。选购一台喷涂机器人替代工人很划算,自动喷涂机器人厂家节省下的人工费用能用作采购喷涂材料等,单位时间内的喷涂面积更广更均匀,成品品质可圈可点。三、价格标准公道与聘请一批专业喷涂工人相较,喷涂机器人的价格并不昂贵,而且选择它获得的回报率很高,一般来说几年时间便可赚回成本。价格方面的优势自然毋庸多言,喷涂机器人长期优质的表现带领企业走上扩大利润的捷径,让企业主开心喜悦赚得盆满钵满。 喷涂机器人领域在未来将迎来黄金期工业机器人价格,许多企业都会在上面投入更多资金,生产线也会迅速扩张,预期产值将会翻好几番。喷涂机器人机械程度高却运转灵活媲美人手,在日复一日高强度的工作中精准完成每项任务,工作精细程度不断升级无可挑剔。

工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的工业机器人还有行走机构。供应工业机器人大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,工业机器人价格通过RS232串口或者以太网等通信方式传送到工业机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。

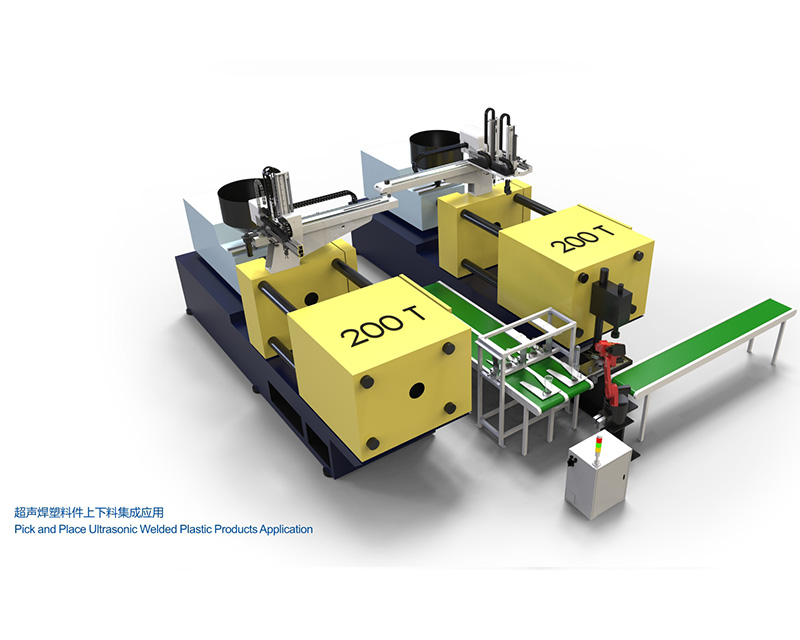
在各种生产实践当中,上下料机器人的机械夹爪已经被大量的应用,因为上下料机械夹爪具有操作方便而且效率高的优点,能够提高产品的生产质量以及能够避免工人在生产线上进行长时间的单调繁重劳动。那么上下料机械夹爪具有哪些主要的部件呢?供应工业机器人 1、抓取和传送机构抓取和传送机构又被形象的称之为手部和臂部,其中,抓取机构包括有手指和传力机构,在工作中起到对物件进行抓取和放置的作用。上下料机械夹爪的传送机构则包含了手腕和手臂等结构,在实践当中可以用来改变物件的方位以及位置。2、驱动部分评价高的搬运机器人的机械夹爪通过驱动部分来产生动力,因此驱动部分也是它的动力源,通常有液压、气压、电力以及机械式驱动四种不同的驱动形式。其中,液压驱动系统是由油缸、阀、油阀和油箱等组成;气压驱动系统是由气缸、气阀、空压机(或由空气压缩机站直接提供)工业机器人价格和储气罐等组成;电机驱动系统是由一些电动机组成。 3、控制部分机械夹爪的控制部分一般包括有程序控制部分与行程检测反馈部分,是上下料机械夹爪中的指挥系统,因为上下料机械夹爪中的每一个程序动作都是由控制部分来指挥执行的,包括动作的执行顺序、动作的起始位置以及时间等,此外,对运行的速度和加速度也能进行控制。上述这几个部分就是上下料机械夹爪中的主要部件,通过这些部件的共同作用就能够完成程序设定好的工作,而且还能确保按照要求的顺序和时间去执行,因此,很多生产加工型的企业都会采购高质量,完善的上下料机械夹爪并将其安装在主机设备上来执行上下料程序。


 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
地址:江苏省无锡市锡山区羊尖镇锡沪路328号 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
