
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1

一、码垛机械臂特点优势1、可实现码垛、物流自动化,节省人力2、码垛工作高速、准确3、应用范围广泛,可在不宜人工操作的恶劣环境中工作4、机身转动灵活,不卡顿5、种类多样,适用于各行业二、将码垛机机械臂按照不同的分类方式可以将其分为不同的类型1、按照结构形式分类:直角坐标型码垛机械臂和关节型码垛机械臂。供应注塑机械手直角坐标型码垛机械臂和关节型码垛机械臂两者相比,直角坐标型的使用空间大、操作范围小、灵活性差、定位精度高、计算机控制简单,关节型的机身小、动作空间大、操作灵活2、 按照应用行业分类:工业品码垛机器人、食品饮料码垛机器人、水泥码垛机器人等。注塑机械手厂各行业使用的码垛机器人的抓手会因所码垛的产品包 装不同而不同,但其他部件大致相同,只工作原理也相差不大。三、码垛机械臂结构组成垛机器人主要由主机机座、立柱、码箱小车、提升装置、夹箱装置、安全装置、电气装置等组成。具体结构组成,不同的码垛机器人组成不相同,不过基本设置差别不大

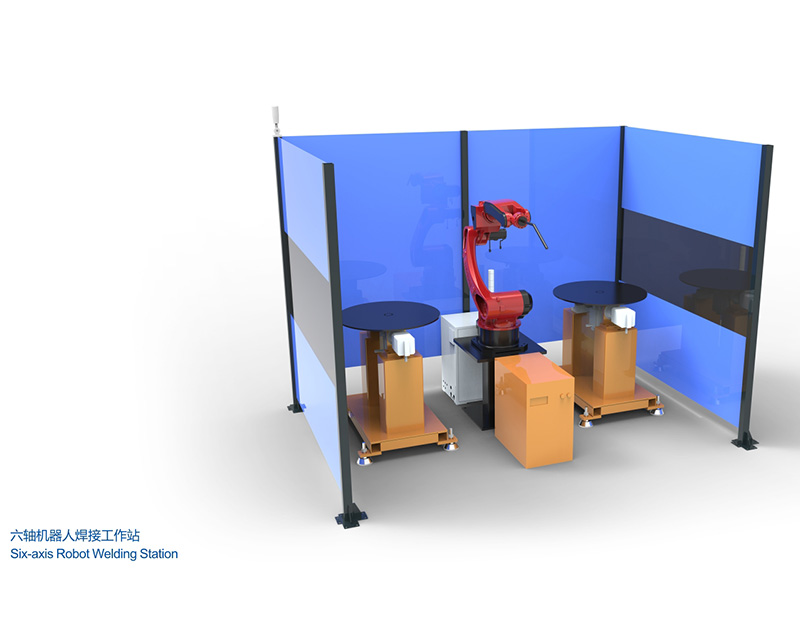
焊接机器人的使用不仅可以稳定和提高焊接质量,提高生产效率,而且还降低了对工人焊接技术的要求,从而缩短了产品升级的准备周期,减少了相应的设备投资。供应注塑机械手选择自动生产线结构相匹配、适合的焊接机器人焊接;根据保证接头焊点焊接质量和生产效率高的焊接工艺,选择不同的焊接机器人末端轴承载力;要选择相应的操作范围和技术性能参数能满足工件施焊位置的焊接机器人。在满足生产规模、生产节拍、保证机器人焊接质量前提下,工艺设计方案既要优异可行、又要经济合理。在重要部件、部位、还有重要的工序位,按需选配焊接机器人数量。由于焊接机器人的末端接口是一个连接法兰,注塑机械手厂这可以使焊接机器人适应不同的用途。虽然机器人确实会给工人群体带来的冲击,但事实上,焊接机器人并不能消灭工作岗位,反而能产生更多的工作岗位。由于工业自动化水平的不断提高,焊接机器人变得十分普遍,当然与一些发达之间仍然存在一定的差距。多数情况下,焊接机器人带给工人都是有利的一面,但也有一些负面影响。如果想要必被很快的取代,所能做的是提升自己的价值。未来肯定是一个机器人生产的时代,所以机器人技术的提升也是我们所要努力的方向,技术提高、成本降低之后,这样的目标才能得以实现。

工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的工业机器人还有行走机构。供应注塑机械手大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,注塑机械手厂通过RS232串口或者以太网等通信方式传送到工业机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。

1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理四轴机器人的基本工作原理是示教再现;供应注塑机械手示教也称导引,即由用户导引六轴机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。注塑机械手厂3、机器人控制的分类1)按照有无反馈分为:开环控制、闭环控制;开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。2)按照期望控制量分为:位置控制,力控制,混合控制 ;位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制;3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;

常见冲床机械手是工业生产中常用的进行水平/ 垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的四轴机器人电磁阀控制。下面介绍下冲床机械手的组成部分和运动情况。冲床机械手主要由起固定支撑作用的机架、供应注塑机械手机械臂和气爪三部分组成。驱动第一肩关节的运动有2根气动肌肉组成,机架臂有4根气动肌肉组成,大臂上安装有4根气动肌肉,小臂上安装有4根气动肌肉。v的分类;1.按驱动方式可分为液压式、气动式、电动式、机械式机械手;2.按适用范围可分为专用机械手和通用机械手两种;注塑机械手厂3.按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。冲床机械手能够实现4个自由度的运动,其各自的自由度的驱动全部由气动肌肉来实现。最前端的气爪抓取物品,通过气动肌肉的驱动六轴机器人实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机械手的动作要求。 而冲压机械手的动作过程如下:从原点开始按下启动按钮时,下降电磁阀通电,机械手开始下降。
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。供应注塑机械手6轴工业机器人的全部控制由一台微型计算机完成。另一种是分散式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力控制。 6轴工业机器人的特点主要有以下几方面;1)可编程:6轴工业机器人最大特点是柔性启动化,注塑机械手厂柔性制造系统中的一个重要组成部分。工业机器人可随其工作环境变化以及加工件的变化进行再编程,适合于小批量多品种具有均衡高效率的柔性制造生产线的应用。2)拟人化:6轴工业机器人结合机器人与人的特点。在6轴工业机器人的结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应能力


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
