
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1

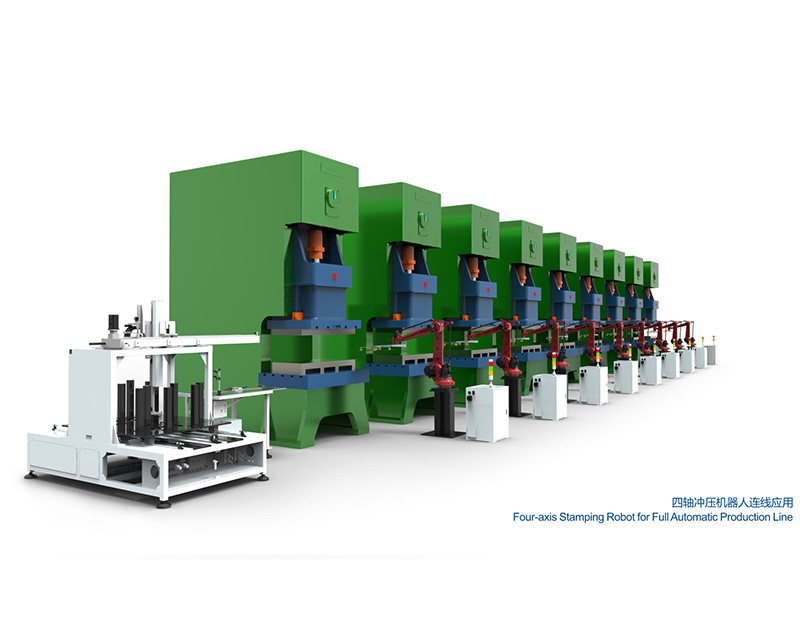
四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;同时配以先进的电器控制柜和示教盒,其性能优越、价格低廉、操作简便。能够随意连接油压机、供应工业机器人齿轮冲床、气动冲床、攻牙机、铆钉机等,无论冲床吨位大小、机台高低、都可连接,实现设备自由组合、多角度实现各种复杂冲压动作、翻转、打废料、侧挂或斜放、堆料等,并适应连续模、单机多模的工艺要求等。预存100组产品工艺信息、方便转产。识别双料和冲床两次或多次冲压,保护工业机器人、冲床和模具的安全并能实现远程通讯。工业机器人价格四轴冲压机械手的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛(quill)的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种设计使四轴冲压机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴工业机器人擅长高速取放和其他材料处理义务。

机械手加工制造领域是安全隐患较大的地方,所以无论是从企业还是个人来讲,都要安装保护装置,采取安全防护措施,机械周围该安装什么样的保护装置成为各大企业的难题。就工况环境和工作方式来讲能分很多种保护装置,比如机械手周围就可以安装安全地毯,因为机械手要在规定的区域内转动操作,供应工业机器人人员误入的话很可能被机械手蹭到,安装安全地毯能够有效地避免这种事故,安全地毯是一种直接铺设在地面上,固定好压边连接好输出信号线后,就可以正常使用,安全地毯是一种无源触点两组常开信号输出的压敏式保护装置,安全性比光幕高一些。工业机械手臂是一种用于移动各种材料、零件、工具或专用装置,通过可编程序动作来执行种种任务并具有编程能力的多功能工业机械手臂。它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求工业机器人价格。一、工业机械手臂材料应根据手臂的工作状况来选择。(1)根据设计要求,工业机械手臂要完成各种运动。因此,对材料的一个要求是作为运动的部件,它应是轻型材料。(2)而另一方面,手臂在运动过程中往往会产生振动,这将大大降低它的运动精度。因此,选择材料时,需要对质量、刚度、阻尼进行综合考虑,以便有效地提高手臂的动态性能。

常见冲床机械手是工业生产中常用的进行水平/ 垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的四轴机器人电磁阀控制。下面介绍下冲床机械手的组成部分和运动情况。冲床机械手主要由起固定支撑作用的机架、供应工业机器人机械臂和气爪三部分组成。驱动第一肩关节的运动有2根气动肌肉组成,机架臂有4根气动肌肉组成,大臂上安装有4根气动肌肉,小臂上安装有4根气动肌肉。v的分类;1.按驱动方式可分为液压式、气动式、电动式、机械式机械手;2.按适用范围可分为专用机械手和通用机械手两种;工业机器人价格3.按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。冲床机械手能够实现4个自由度的运动,其各自的自由度的驱动全部由气动肌肉来实现。最前端的气爪抓取物品,通过气动肌肉的驱动六轴机器人实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机械手的动作要求。 而冲压机械手的动作过程如下:从原点开始按下启动按钮时,下降电磁阀通电,机械手开始下降。

工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。供应工业机器人6轴工业机器人的全部控制由一台微型计算机完成。另一种是分散式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力控制。 6轴工业机器人的特点主要有以下几方面;1)可编程:6轴工业机器人最大特点是柔性启动化,工业机器人价格柔性制造系统中的一个重要组成部分。工业机器人可随其工作环境变化以及加工件的变化进行再编程,适合于小批量多品种具有均衡高效率的柔性制造生产线的应用。2)拟人化:6轴工业机器人结合机器人与人的特点。在6轴工业机器人的结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应能力
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理四轴机器人的基本工作原理是示教再现;供应工业机器人示教也称导引,即由用户导引六轴机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。工业机器人价格3、机器人控制的分类1)按照有无反馈分为:开环控制、闭环控制;开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。2)按照期望控制量分为:位置控制,力控制,混合控制 ;位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制;3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;

在机器人焊接设备购买的时候,会发现它还有一些配件,也是特别需要注意选择的。如果没有选择合适的一些配件,在进行设备使用的过程当中,也会存在这样,或者是那样的一些问题。任何一台专业性比较强的焊接机器人,都需要搭配一个机器人焊接座,这样在使用的时候,才能够保证它的稳定度是比较高的供应工业机器人。对于整个设备的使用,才能够比较有帮助一些。机器人焊接座有不同型号,可以提供给用户来进行选择。根据生产的需求不同,那么在产品选择的时候,就应该选择不同的产品搭配使用,才能保证产品的使用效果是没有问题的。在选择的时候,有一些用户可能不知道,用什么样的方式来进行选择,对于使用效果更有保障一些。其实在选购的时候,可以了解一下自己设备本身的生产特点。工业机器人价格另外还可以跟销售人员来进行沟通,自己的需求,自己设备的特点,在跟销售人员沟通清楚以后,销售人员就可以根据实际情况来推荐合适的产品。这样在选择的时候,就能够用比较轻松方便的方法,选择最合适的型号规格来使用。


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
