
-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:www.borunte2049.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号
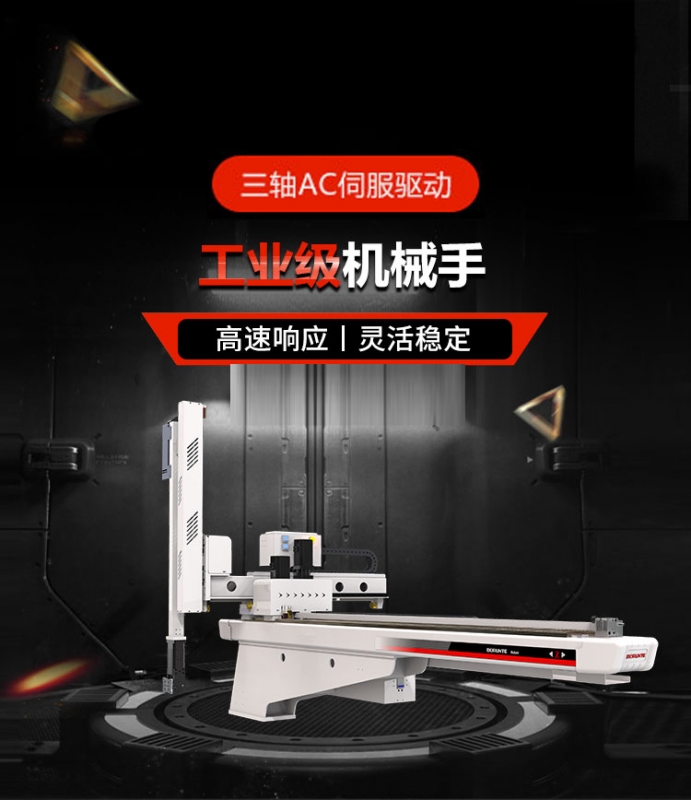
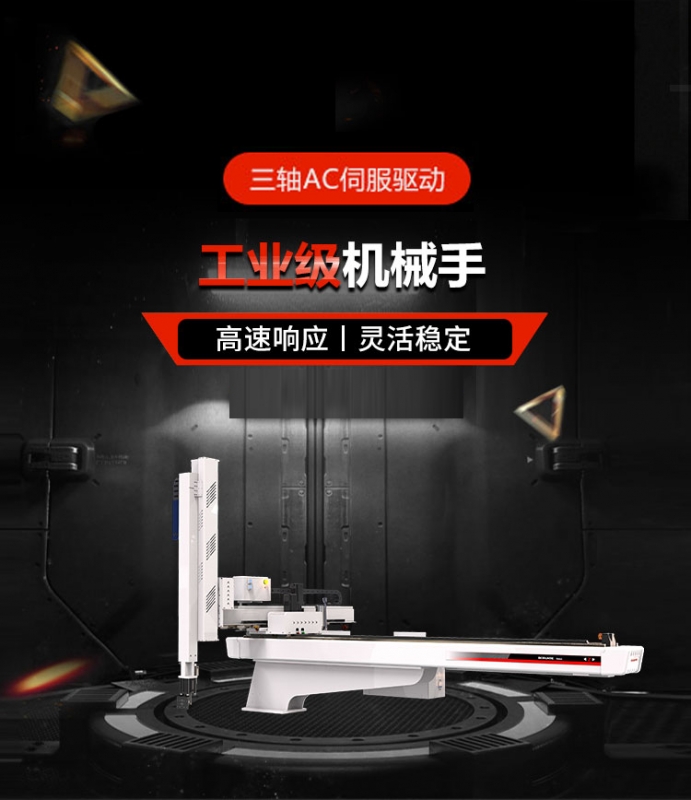
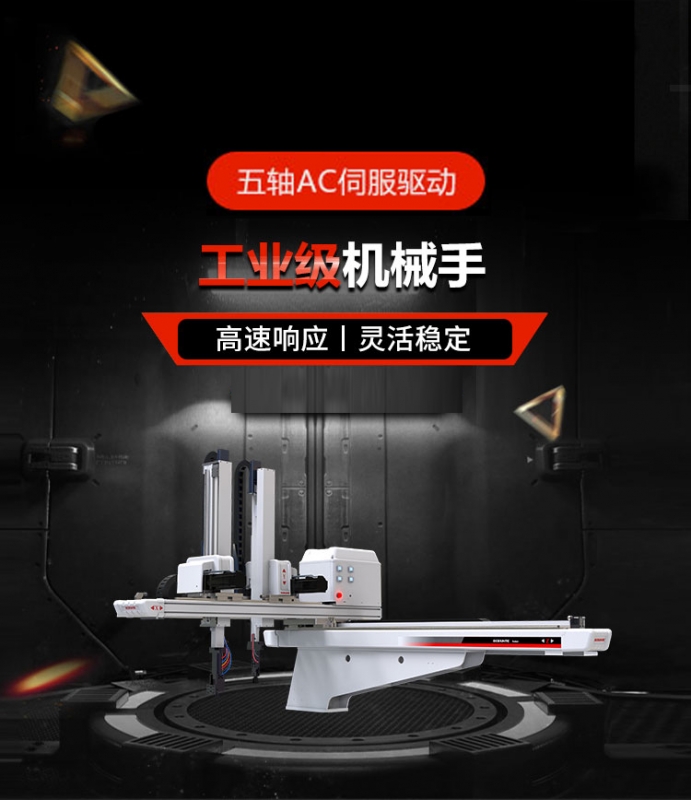
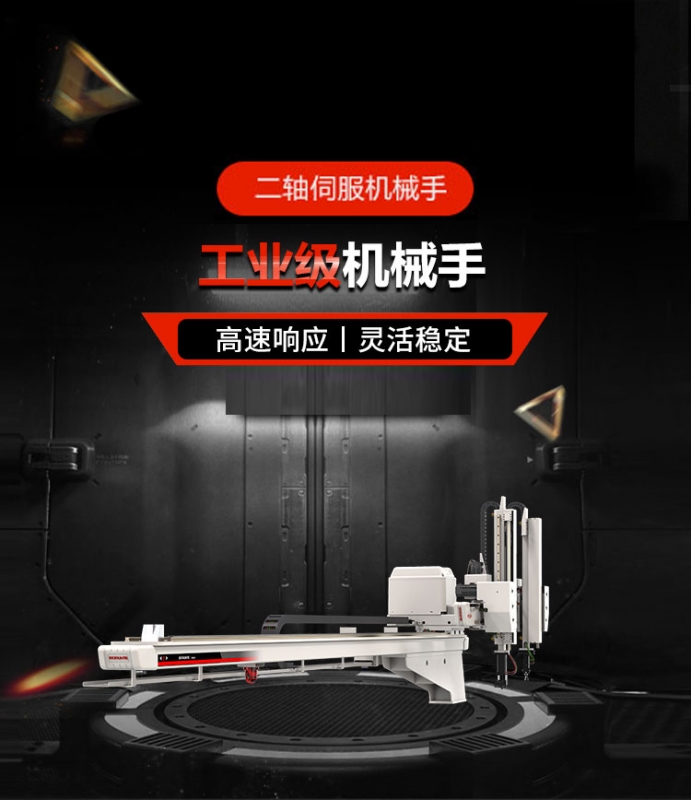
注塑机专用机械手是能够模仿人体上肢的部分功用,能够对其进行自动操控使其依照预订要求运送制品或操持工具进行出产操作的自动化出产设备。对于注塑出产中使用的机械手,一般可按其功用分为以下三种类型:
1、简易型注塑机械手
简易型注塑机械手可分为固定模式程序型和可变程序型两种。固定程序型注塑机机械手不能改动其工作程序,它具有可弹性、移动的手臂,使用自动操控设备做简略、规格和重复的动作;可变程序型注塑机机械手的工作程序能够改动,一般多为气动或液动,其结构简略,比较简略改动程序,多用于点位操控,近年来普遍选用可编程序操控器或许微型电脑来组成操控体系,扩展了其使用规模。
2、回忆再现型注塑机械手
这种机械手具有回忆及可变程序的才能,多为电液伺服驱动,有较多的自由度,能够造行比较复杂的造作。

3、智能型注塑机械手
这种机械手由电脑经过各种传感器进行操控,具有视觉、触觉和热觉功用,可履行各种操作,是才能zui强的一种机械手,现在国内使用较少。修改本段三、注塑机专用机械手的组成注塑机专用机械手的组成一般由履行体系、驱动体系、操控体系等组成。
履行体系,机械手抓取或开释制品、完成各种操作运动的体系,由臂部、腕部和手部等部件组成。
驱动体系,为履行体系的各部件提供动力的体系,有气动、电动及机械等形式。现在比较常用的是气动和电动两种形式,气动式速度快、结构简略、成本低、有较高的重复定位精度;电动式速度快、可完成接连操控、定位精度高、但成本较高。
操控体系,经过对驱动体系进行操控,使履行体系依照预订的工作要求进行操作,并对履行体系的动作进行修正的体系,一般包含方位检测设备和程序操控部分,通常选用点位操控和接连轨道操控两种方式。修改本段四、规划要点手部
注塑机专用机械手的手部是用来直接抓取注塑制品的部件。由于注塑制品的形状,大小,分量及表面特征等方面存在着差异,因此注塑机械手的手部有多种形式,一般可分为夹持式和吸附式两种。
夹持式手部的主要形式为夹钳式,常用于抓取不易破碎或变形的制品,它对所抓取的制品的形状有较大的适应性。夹持式手部由手指,传动机构和驱动设备组成。



 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
地址:江苏省无锡市锡山区羊尖镇锡沪路328号 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com
